Loading...
Searching...
No Matches
ale_rigid_kinematics Module Reference
Defines data structures and algorithms for configuring, calculating, and time-integrating the rigid-body motion (translation and rotation) of objects in an ALE simulation. CPU-only module.
Data Types | |
| type | ale_body_t |
| Configuration for a single moving body. More... | |
| type | ale_config_t |
| Global ALE Configuration. More... | |
| type | body_kinematics_t |
| Calculated Kinematics for a body at current time. More... | |
| type | pivot_state_t |
| State history for time-integration of pivots. More... | |
| type | point_tracker_t |
| Type for a tracked point linked to a body. More... | |
| type | stiffness_geometry_t |
| Stiff Geometry. More... | |
Functions/Subroutines | |
| subroutine, public | init_pivot_state (pivot, body_conf) |
| Initialize pivot state. | |
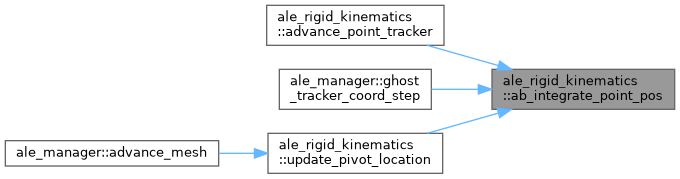
| subroutine, public | ab_integrate_point_pos (pos, vel_lag, current_vel, time, nadv) |
| Advance a single point position (x,y,z) from the point's velocity using AB time-integration. | |
| subroutine, public | advance_point_tracker (tracker, current_vel, time, nadv) |
| Updates the point tracker's position and velocity history using AB time integration based on the current velocity. | |
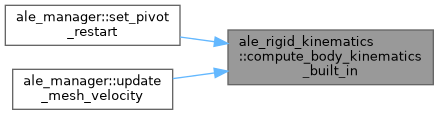
| subroutine, public | compute_body_kinematics_built_in (kinematics, body_conf, time) |
| Compute built-in kinematics for a body. Uses inputs from JSON. CPU-only. | |
| subroutine, public | update_pivot_location (pivot, pivot_loc, pivot_vel, time, nadv, body_conf) |
| Updates pivot location. | |
Function/Subroutine Documentation
◆ ab_integrate_point_pos()
| subroutine, public ale_rigid_kinematics::ab_integrate_point_pos | ( | real(kind=rp), dimension(3), intent(inout) | pos, |
| real(kind=rp), dimension(3, 3), intent(inout) | vel_lag, | ||
| real(kind=rp), dimension(3), intent(in) | current_vel, | ||
| type(time_state_t), intent(in) | time, | ||
| integer, intent(in) | nadv | ||
| ) |
Definition at line 152 of file ale_rigid_kinematics.f90.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ advance_point_tracker()

◆ compute_body_kinematics_built_in()
| subroutine, public ale_rigid_kinematics::compute_body_kinematics_built_in | ( | type(body_kinematics_t), intent(out) | kinematics, |
| type(ale_body_t), intent(in) | body_conf, | ||
| type(time_state_t), intent(in) | time | ||
| ) |
Definition at line 208 of file ale_rigid_kinematics.f90.
Here is the call graph for this function:

Here is the caller graph for this function:
◆ init_pivot_state()
| subroutine, public ale_rigid_kinematics::init_pivot_state | ( | type(pivot_state_t), intent(out) | pivot, |
| type(ale_body_t), intent(in) | body_conf | ||
| ) |
Definition at line 142 of file ale_rigid_kinematics.f90.
Here is the caller graph for this function:

◆ update_pivot_location()
| subroutine, public ale_rigid_kinematics::update_pivot_location | ( | type(pivot_state_t), intent(inout) | pivot, |
| real(kind=rp), dimension(3), intent(out) | pivot_loc, | ||
| real(kind=rp), dimension(3), intent(in) | pivot_vel, | ||
| type(time_state_t), intent(in) | time, | ||
| integer, intent(in) | nadv, | ||
| type(ale_body_t), intent(in) | body_conf | ||
| ) |
Definition at line 292 of file ale_rigid_kinematics.f90.
Here is the call graph for this function:

Here is the caller graph for this function:
